Project information
- Category: Deep Learning and Computer Vision
- Client: Enova Robotics
- Project URL: Confidential
Description
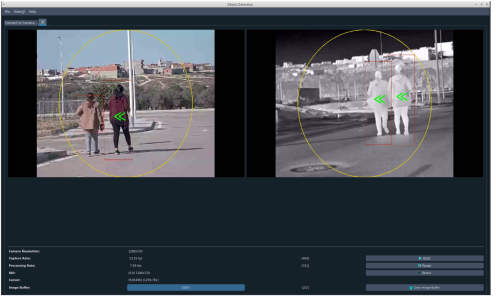
We focus on the problem of automatic detection by robots for surveillance applications. Particularly, the main goal to perform detection in a bi-spectral vision. Using inputs from visible and thermal cameras, we propose a fusion network that uses features from both of them. This fusion process is incorporated into YOLO-v3 architecture. The resulting custom model of the detector is trained in a paired setting in order to improve the results compared to the detection of each input independently. To show the effectiveness of the proposed fusion framework, some experiments are conducted on KAIST, a multi-spectral dataset well-known in the field and commonly used for detection. Also, the detection process is applied in real-time on PGuard robot manufactured by Enova ROBOTICS, the hosting company of this project. In total, this work can be summarized in two steps. The first step is to develop a detection model based on a feature fusion method, then the second step is to integrate the object detection application model in PGuard Robot. Keywords : Robotic Vision, Deep Learning, Neural Networks, Object Detection, YOLO,Visible and Thermal Cameras, Saliency Map, Fusion, bi-spectral vision